Taktzeitoptimierung: Online
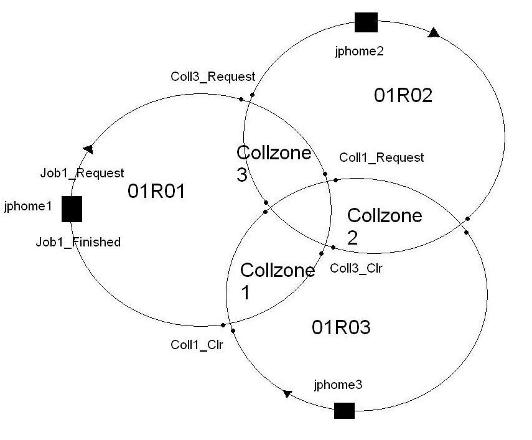
Als Beispiel dient ein Prozess der nicht optimiert ist. Im Bild unten (vor der Optimierung) sehen sie 3 Roboter, die vereinfacht ein Kreis bilden. Jedesmal wenn Roboter 01R01 in die Kollisionszone von Roboter 01R02 rein fahren möchte, fragt er erst bei der SPS nach, ob dieser Bereich belegt ist. Ist der Bereich frei, so besetzt der Roboter 01R01 diesen Bereich, bis er wieder aus der Kollisionszone draußen ist. Ist nun Roboter 01R01 im Kollisionsbereich 3 wartet Roboter 01R02 und Roboter 01R03 so lange, bis der Roboter 01R01 die Kollisionszone verlässt und den Bereich wieder frei gibt.
Dabei muss man sich immer im Klaren sein, dass eine Kollisionszone grundsätzlich der Bereich ist, indem 2 Roboter kollidieren könnten. Dies ist nicht vom Ablauf abhängig, sondern besteht in jedem Fall.